UDS定义的是诊断服务,属于应用层的内容,实现诊断通信的底层总线技术有很多,比如CAN,LIN,Ethernet,Flexray等,由于法规强制的OBD接口是CAN总线的,所以绝大多数场景中诊断都是基于CAN实现的。这就带来了一个问题,classical CAN总线物理层的每一帧只能传输8个字节,CAN FD第帧最多能传输64个字节,那么如果UDS产生的一条诊断命令超过了8个字节,在CAN总线上一帧是承载不了的,就需要进行分包,这也是DoCAN(Diagnose over CAN)要解决的最主要的问题。
UDS定义的是诊断服务,属于应用层的内容,实现诊断通信的底层总线技术有很多,比如CAN,LIN,Ethernet,Flexray等,由于法规强制的OBD接口是CAN总线的,所以绝大多数场景中诊断都是基于CAN实现的。这就带来了一个问题,classical CAN总线物理层的每一帧只能传输8个字节,CAN FD第帧最多能传输64个字节,那么如果UDS产生的一条诊断命令超过了8个字节,在CAN总线上一帧是承载不了的,就需要进行分包,这也是DoCAN(Diagnose over CAN)要解决的最主要的问题。
为了实现诊断命令的分包传输,15765-2总共定义了4种类型的帧结构,每种帧结构以数据域的前两个或一个字节来标识(取决于帧类型)。这四种类型分别是:
SingleFrame
FirstFrame
ConsecutiveFrame
FlowControl
其中SingleFrame用于长度不超过7个字节的诊断命令或响应。FirstFrame,ConsecutiveFrame,FlowControl用于传输长度大于7个字节的诊断命令或响应。每个诊断帧的第一个字节的高4bit用于描述该帧的类型,即该帧属于上述四种中的哪一种。
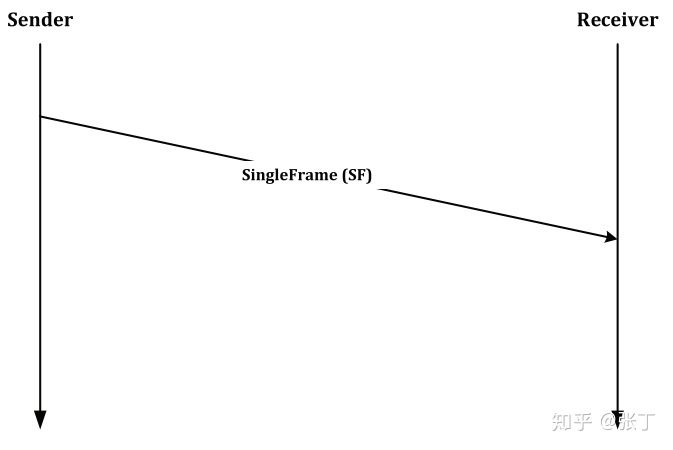
传输层的4种帧结构 SingleFrame用于下面这种简单的场景:当诊断报文长度小于等于7时,再加上一个字节的PCI控制信息就是小于等于8,可以在一帧CAN报文上传输,所以不需要进行分包。此时数据域的第一个字节高4bit值为0000,标识这是一个帧SingleFrame,低4bit是SF_DL,即DataLength,描述后面有几个字节。如果有没有使用的字节,通常要用0x55或0xAA来填充,因为这两个值的二进制表述其实就是01010101和10101010,这样在CAN总线上可以让信号跳变得更频繁一些,不会出现长时间电平不变的情况。
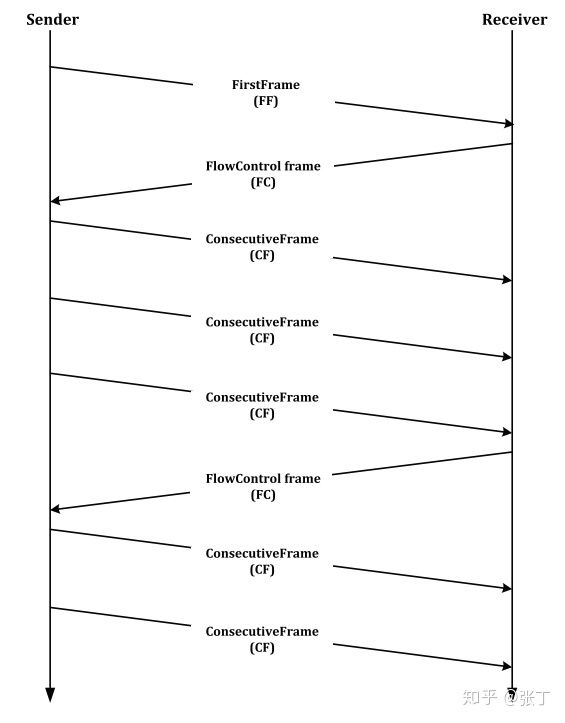
SingleFrame的应用场景 如果一帧CAN报文无法承载一条诊断报文,则需要按照下面的流程进行分包发送:
诊断报文的分段发送 首先,发送端要以一个FirstFrame开启通信,告诉接收端还有后续的内容要发,FirstFrame使用前两个字节作为PCI信息,第一个字节高4bit为0001,标识这是一个FirstFrame,低4bit加上第二个字节用于描述总共发送的数据长度是多少(包括在FirstFrame中和在ConsecutiveFrame中的所有字节数)。
之后接收端发送FlowControl,告诉发送端能以什么样的速度来发送数据,FlowControl第一字节的高4bit为0011,低4bit为FS,即FlowStatus,第二个字节为BS(BlockSize),第三个字节为STmin(SeperateTime)。FlowControl有0,1,2三种状态,分别命名为ContinueToSend (CTS),Wait (WT),Overflow (OVFLW)。如果允许发送端继续发送ConsecutiveFrame,则FlowStatus=0;若要求发送端等一会再发送ConsecutiveFrame,则FlowStatus=1,再下次允许sender发送ConsecutiveFrame时,receiver再发一个FlowStatus=0的FlowControl。如果receiver因为资源问题无法接收sender发送的数据,则发送一个FlowStatus=2的FlowControl。
BS指示sender一次可以发送多少个ConsecutiveFrame,当发送ConsecutiveFrame数量达到BS时,需要receiver再次以一个FlowControl开启下一波的ConsecutiveFrame发送。
receiver根据自身的接收和处理能力使用STmin指示sender在发送ConsecutiveFrame时最小的时间间隔是多少,从而实现流控制。
ConsecutiveFrame就是承载FirstFrame无法完全承载的剩余数据了,它使用第一个字节用作PCI,高4bit为0010,低4bit用于标识ConsecutiveFrame的序列号,从1开始,每发送一次ConsecutiveFrame增加1。
不分段传输的诊断服务举例:
request 0 2 10 03 55 55 55 55 55
response 0 6 50 03 00 32 01 F4 AA
这是一个请求进入extended session的最简单的诊断服务,请求和应答都是SingleFrame,加粗的0标识了SingleFrame,后面的2和6表示了这条诊断报文拥有几个字节的数据。
分段传输的诊断服务举例:
这是一个读取DTC的命令和应答。
03 19 02 08 55 55 55 55 (诊断仪发送的SingleFrame的request)
10 33 59 02 19 01 00 07 (ECU以FirstFrame开始传输的response)
30 00 00 55 55 55 55 55 (诊断仪发送的FlowControl)
21 09 03 05 02 09 05 04 (ECU发送的ConsecutiveFrame)
22 07 09 05 06 06 09 05 (ECU发送的ConsecutiveFrame)
23 08 03 08 07 01 05 08 (ECU发送的ConsecutiveFrame)
24 07 01 06 08 07 01 0C (ECU发送的ConsecutiveFrame)
25 08 07 01 0D 08 07 03 (ECU发送的ConsecutiveFrame)
26 07 09 08 01 01 09 09 (ECU发送的ConsecutiveFrame)
27 01 07 09 AA AA AA AA (ECU发送的ConsecutiveFrame,此时传输结束)
在这里我把所有传输层相关的PCI信息都用粗体标识了。
需要提一下的是,BS和STmin等于0时,表示接收端可以以最快的速度来接收数据,发送端可以一次发送的ConsecutiveFrame数量不受限制。